
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- css
- 3D tiles
- display:flex
- 3DTiles
- PostgreSQL
- PDAL
- anotherdxfimporter
- gdal2tiles
- jupyternotebook
- georeferrencing
- Line Dashed
- attribute Selector
- GeoServer
- DXF
- publish/subscribe
- PostGIS
- raster2pgsql
- pg_notify
- line width
- extent linestring
- QGIS
- WMTS
- GIS
- PointCloud
- VWORLD
- Cesium
- Potree
- CesiumJS
- GDAL
- threejs
- Today
- Total
코드조각 저장소
위성사진 + Elevation + TIN -> RGB PointCloud 본문
작성한 다른 글에서 사용하려고 테스트 데이터를 만드는 과정을 해결하여 정리해 봅니다.
사용하는 데이터셋은 비슷합니다만 GDAL만으로 처리하기에는 실력 부족으로 막혔던 부분을 데이터베이스에 raster데이터를 적재하고 각 포인트의 값을 추출하는 방식으로 해결하였습니다.
PointCloud의 자료 형식은 많이 있지만 제일 단순하다고 판단된 [ Text : X Y Z R G B ] 형식으로 원천 데이터를 생성하였고 CloudCompare등을 통해 LAS, PLY등으로 변환하여 사용 할 수 있었습니다.
처음 사용한 자료는 국토정보플랫폼에서 제공하는 공개(DEM) 자료를 사용하였습니다 하지만 이자료는 구역별 높이값을 제공하고 있어서 생성된 결과물에 계단 처럼 층이 저 있었습니다.

그래서 표고데이터 및 등고선 데이터를 이용하여 PostGIS에서 제공하는 함수를 통해 raster 각 픽셀에 대한 Band 데이터에 접근할 수 있었고, 정사영상 픽셀위치에서 DEM으로 생성한 TIN에서 Z 값을 보간하는 방식을 사용하였습니다.
PostGIS Intersection상으로는 2D, 3D 결과에 오류가 있어 세 점을 이용한 평면 방정식을 사용하여 Z값을 취하였습니다.

수집된 데이터에 대한 특성 파악이 중요하다는것을 알게된 작업이었던것 같습니다. 작업에 사용한 스크립트 입니다. 결과물은 Potree + PotreeConvertor를 이용하여 전처리하였고 CesiumJS를 이용하였습니다.
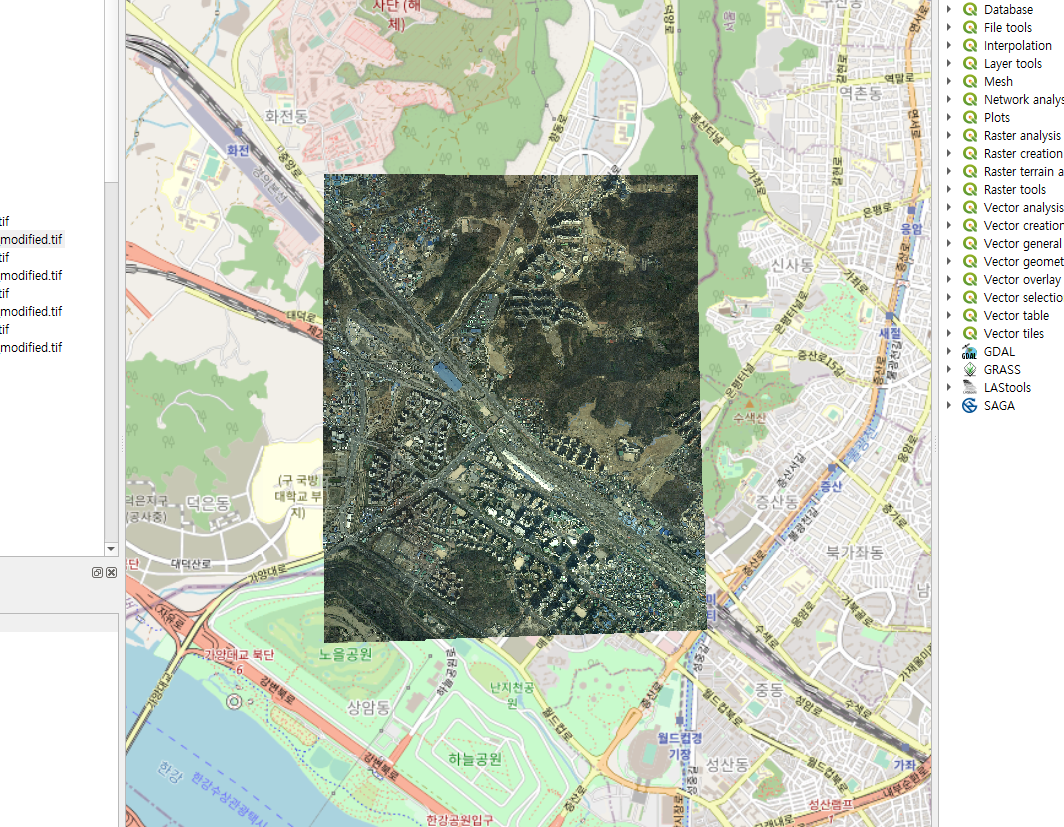
1 정사 영상 Load : raster2pgsql (EPSG:5186) GeoReferrencing
2 국토정보플랫폼 표고, 등고선 Elevation(EPSG:5181) -> TIN : st_delaunaytriangles
(SHP to PgSQL)
create table tmp_rater_el_tin as
select (st_dump(st_delaunaytriangles(st_collect(st_setsrid(st_makepoint(st_x(geom), st_y(geom), val), st_srid(geom)))))).geom as geom
from (
select (st_pixelaspoints(rast, 1)).*
from el
) a
;
3.정사영상 raster pixcel geometry + RGB 추출 -> Table
create table tmp_rater_rgb_pt as
select row_number () over() id, geom, r,g,b
from
(
select geom
,st_value(rast, 1, geom ) r
,st_value(rast, 2, geom ) g
,st_value(rast, 3, geom ) b
from (
select rast, (st_pixelaspoints(rast, 1)).*
from "_test_raster" tr
) pt
) src
4 Mesh + Point Intersect를 통한 Z값 보정 RGB point 자료 생성
* 필요 시 Reprojection(표고 : 5181, 정사영상:5186 )
create table tmp_el_tin as
select
id
,ST_Transform(geom, 5186) geom
from tmp_el_pt
;
drop table tmp_raster ;
--fine Elevetion Z in rgb raster
create table tmp_raster as
select
st_x(rgb.geom) x
,st_y(rgb.geom) y
/* ,st_z(st_intersection(el.geom, rgb.geom)) z */
,st_z(fnfindzonmeshaspoint2d(el.geom, rgb.geom)) z
,rgb.r
,rgb.g
,rgb.b
--,st_intersection(rgb.geom, el.geom) ins */
from tmp_rater_rgb_pt rgb
, tmp_el_tin el
where st_intersects(el.geom,rgb.geom) = true
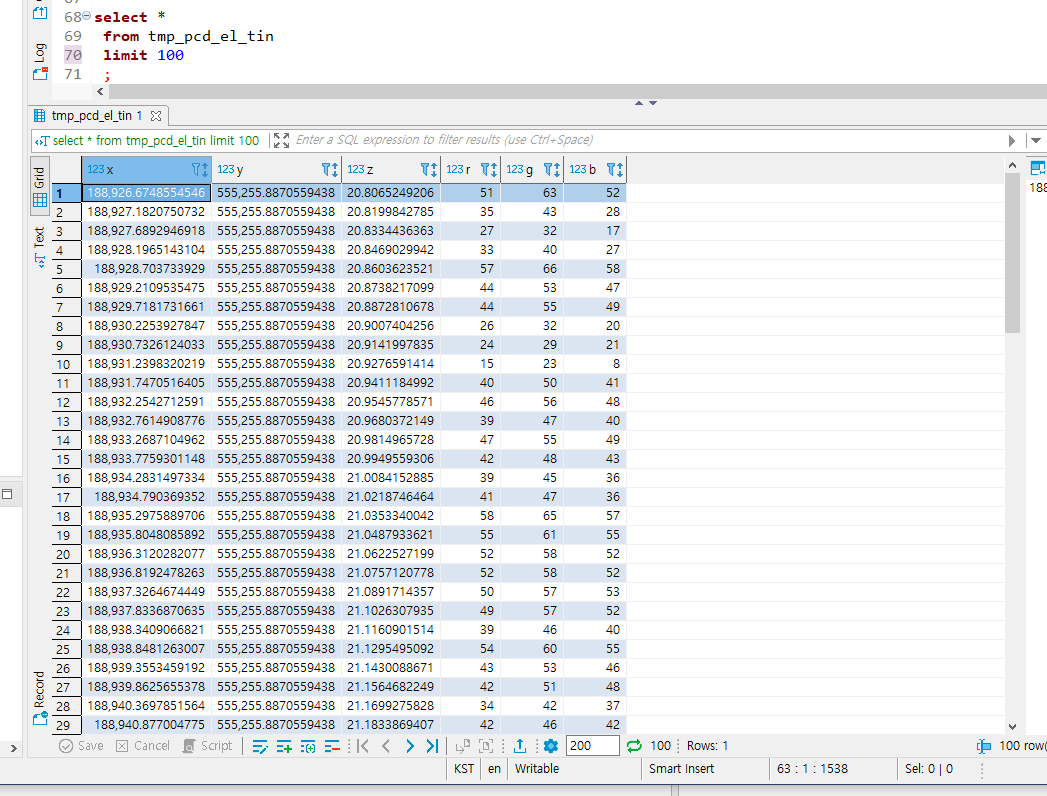
5 Table Export (Text Blank delimiter)
x y z r g b
-해더 및 포멧, 인코딩 오류 시 CloudCompare에서 las 변환 처리)
6. PointCloud Viewer : Potree + PotreeConvertor세점 평면방정식을 이용한 Z 값 보간에 대해서는 보완하여 다음 글에서 소개해 드리겠습니다.



